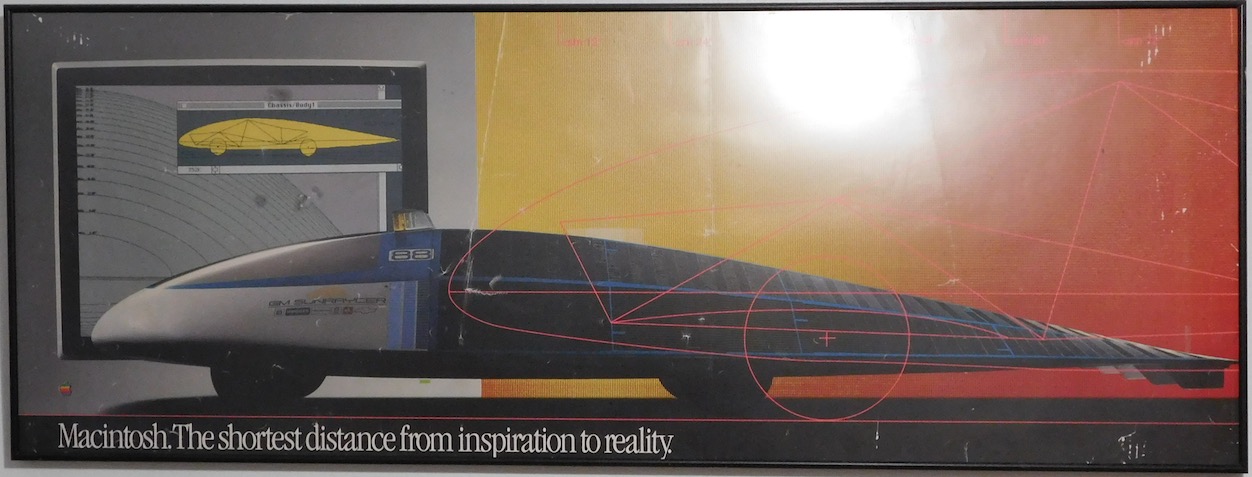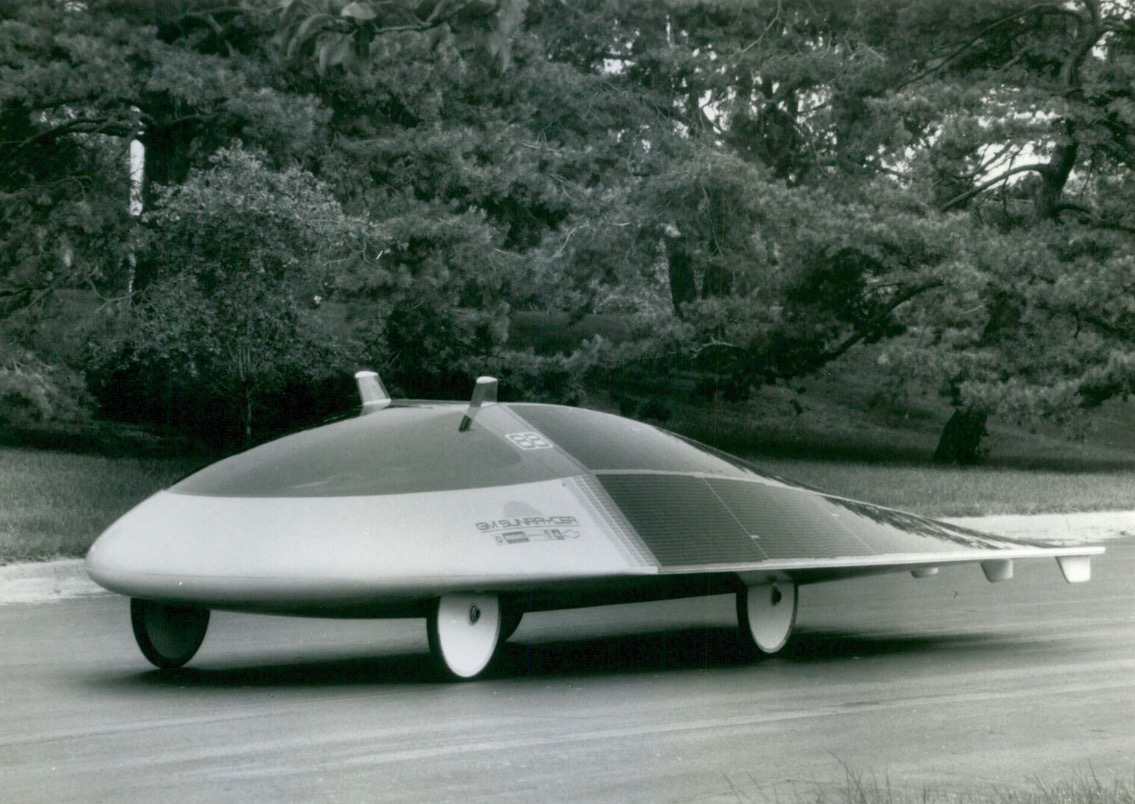
1987 SunRaycer Solar Vehicle
Prototype
---> AeroVironment <---
===
Vehicle Description
SunRaycer development and history
(Caltech Engineering Lecture Series)
The SunRaycer came into being thanks to an unusual combination
of unlikely events. The saga begins with Hans Tholstrup, an
Australian adventurer whose love for nature combined with
his passion for adventure. Motivated by climate change, he and
engineer Larry Perkins drove a solar-powered vehicle across the
Australian continent in 1983 – from Perth in the west to Sydney in the
east. That experience motivated Tholstrup to think bigger
and challenge the world to the first transcontinental solar race.
Forty-four pages of rules were assembled, and sponsorship was
obtained. In late 1986, a copy of these rules landed on the desk of
GM’s CEO, Roger Smith, who then sent them on to the
newly-acquired Hughes Aircraft Company, where they caught the
attention of Vice President Howard Wilson. Wilson reasoned
that entering the “World Solar Challenge” race could provide valuable
public exposure for GM while helping link Hughes with the
automotive world. One challenge stood out: The race was set to
start on November 1, 1987, less than ten months away.
Wilson brought up the matter with Ed Ellion (Caltech PhD ’53),
Director of Technology at Hughes. Ellion, in turn, suggested that
Wilson contact Paul MacCready (Caltech PhD ’52), a former
classmate of his and founder/CEO of AeroVironment (AV). Wilson
did just that, and after initial meetings, AV enthusiastically took on the
job – to design and fabricate the world’s fastest
solar-powered vehicle.
A year and a half earlier, AV had taken on a special project for the
National Air and Space Museum – the design and
construction of a flying half-scale replica of a Quetzalcoatlus
Northropi, a giant prehistoric pterodactyl with a wingspan in excess
of 30 feet. Because of this project, Alan Cocconi (Caltech BS ’80)
became a consultant to AV - to execute flight controls associated
with both the head and wings. Thanks in part to the
pterodactyl project, one of the country’s most talented power
electronic engineers had connected with AV.
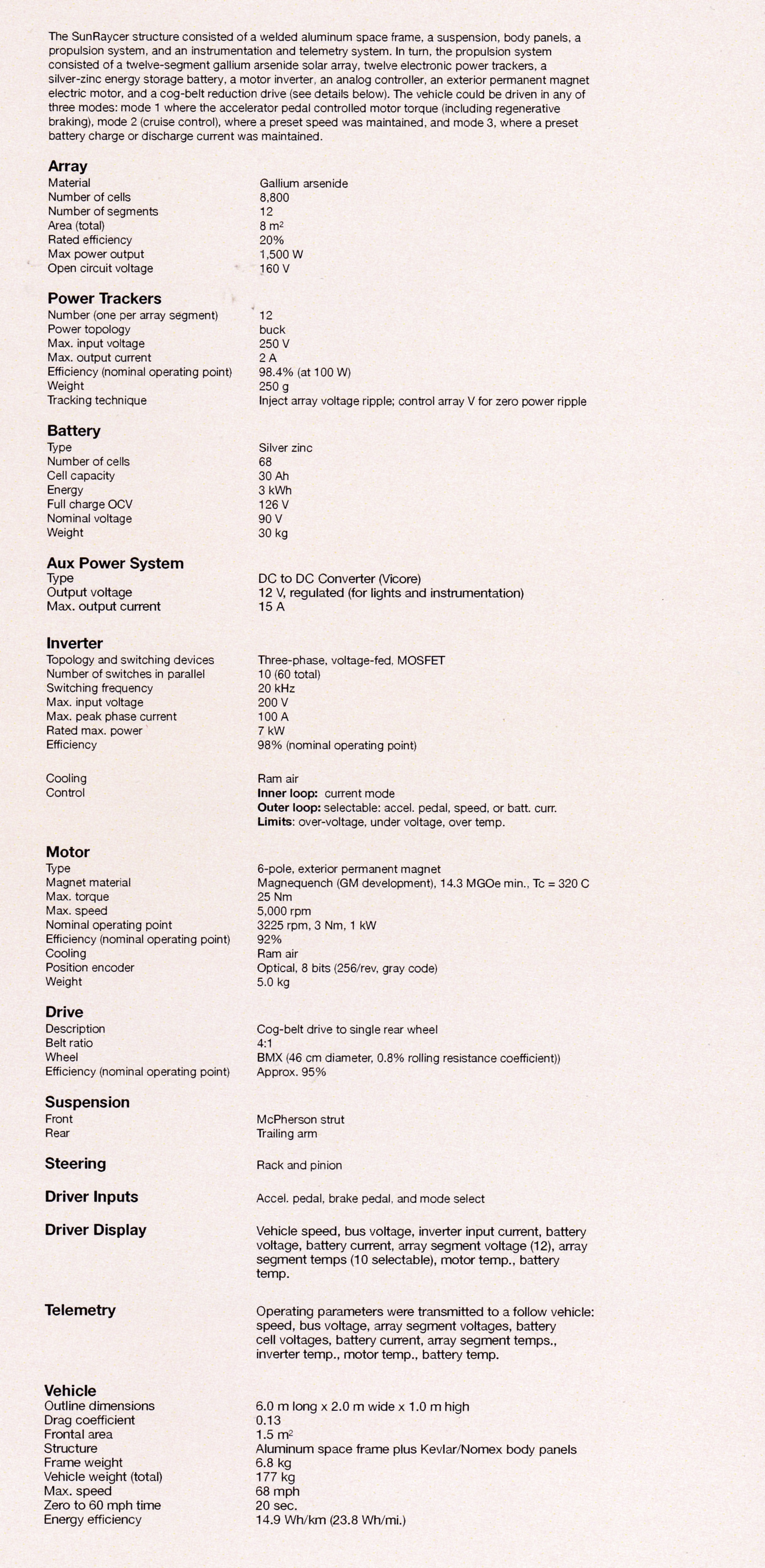
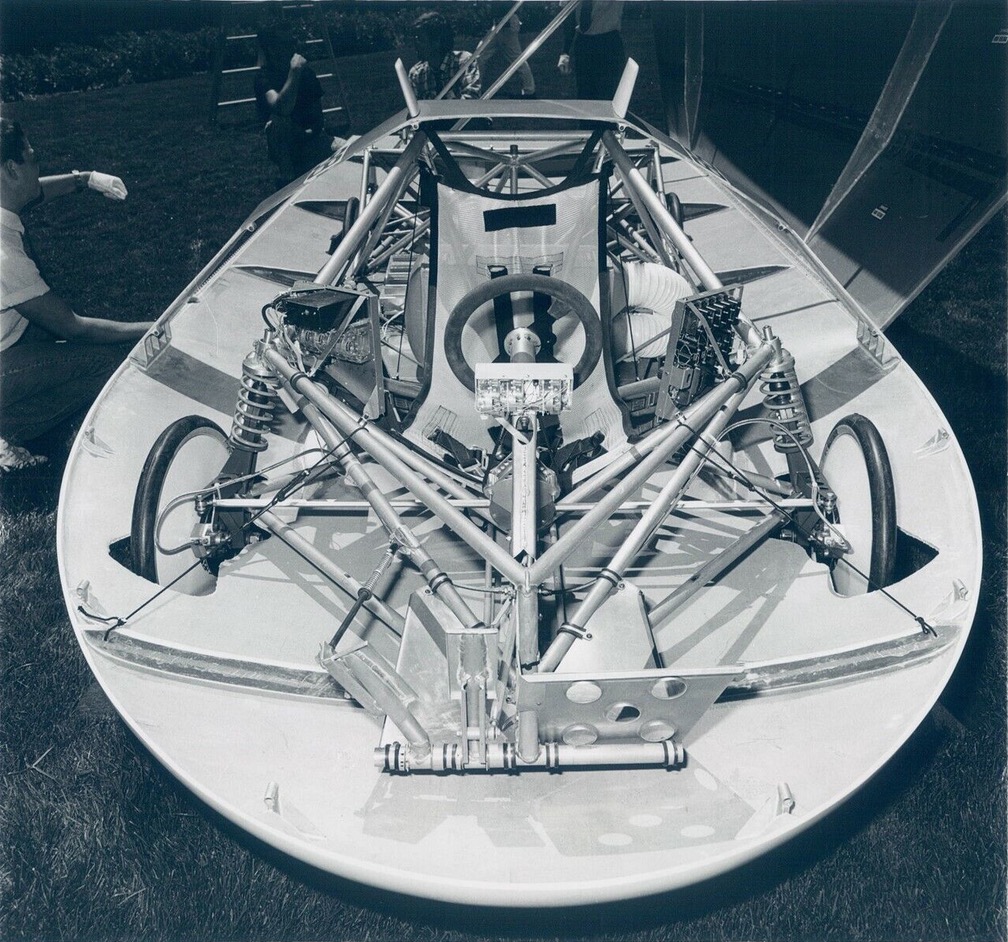
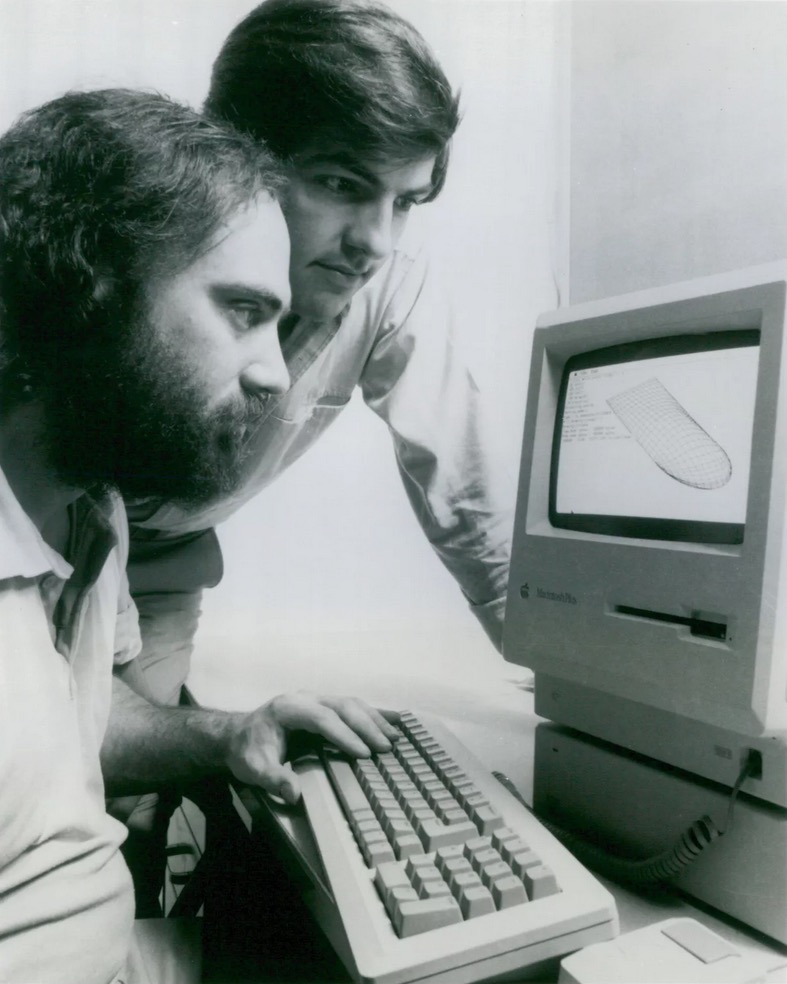
At the outset, Alec Brooks (Caltech PhD ’81) took leadership of
the SunRaycer effort. One of the first tasks was to determine the
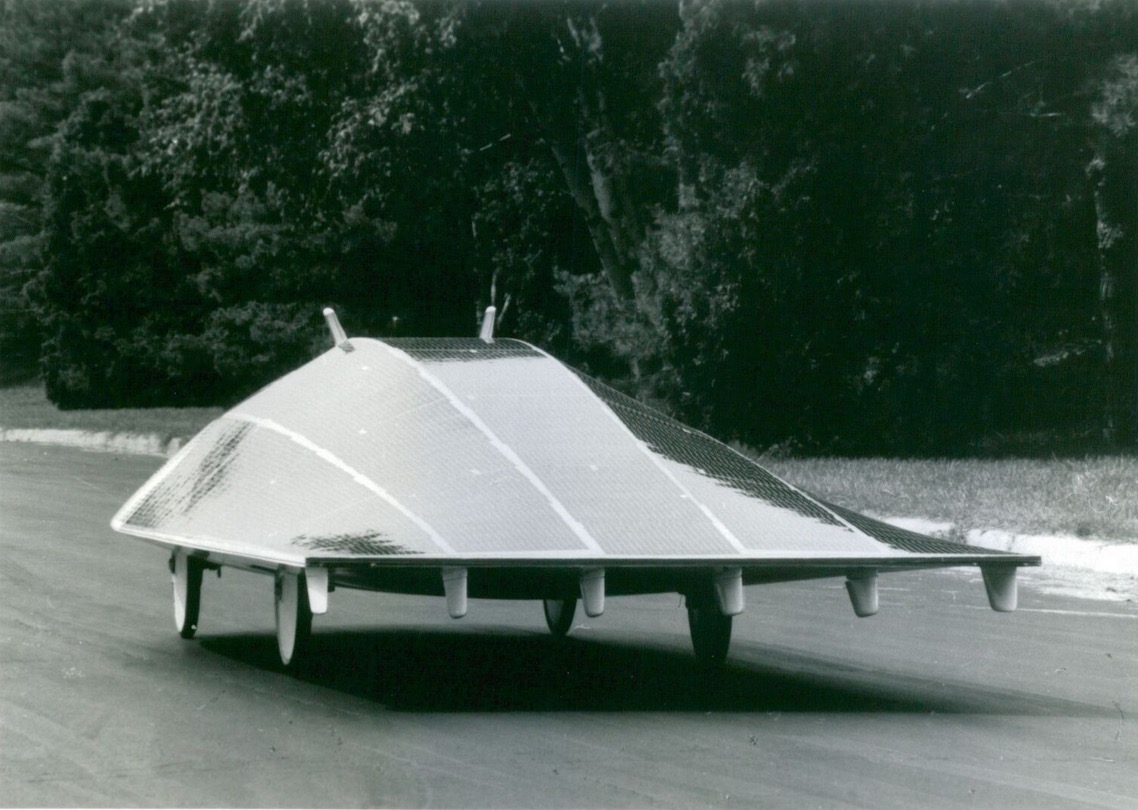
vehicle configuration and basic parameters. From this effort,
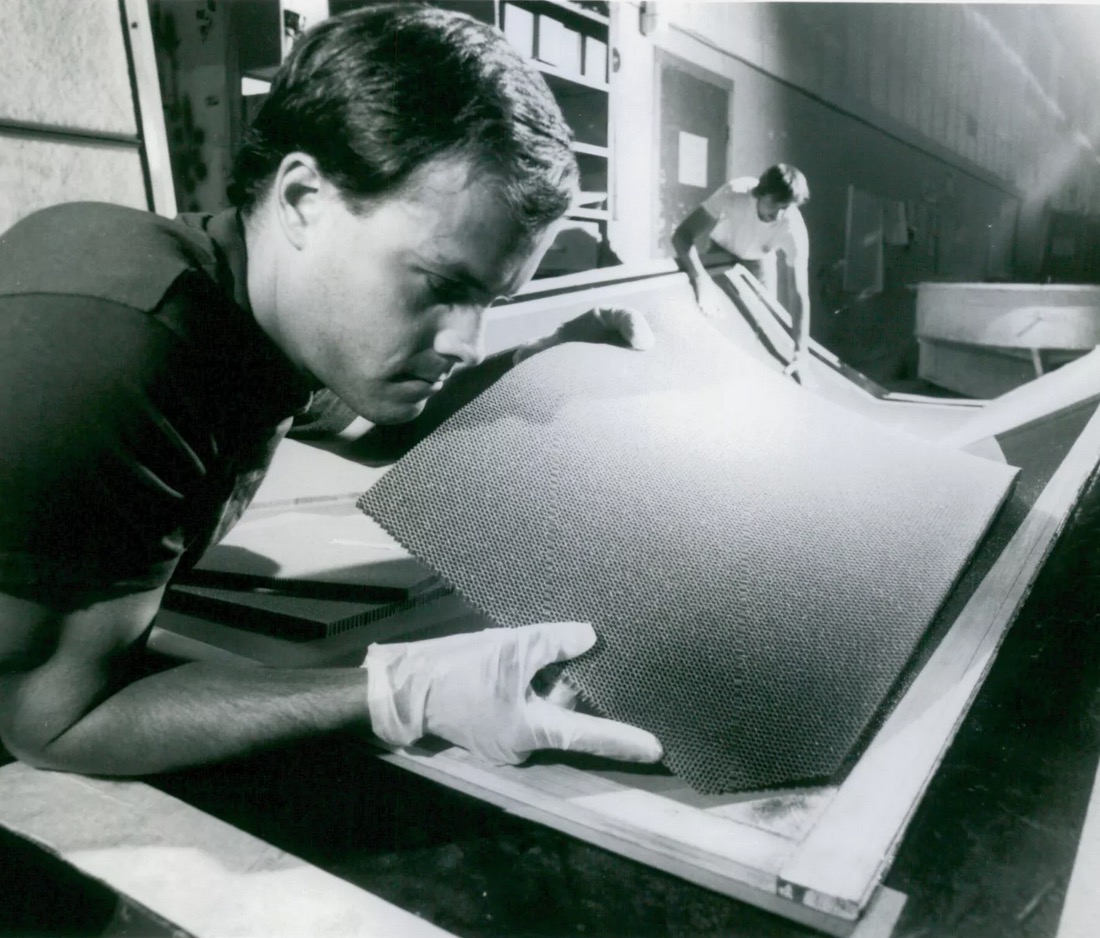
it was understood that a curved, integrated solar panel would provide
a superior result compared to the conventional flat panel array,
which could be tilted for optimal sun. The curved, integrated
approach would significantly reduce aerodynamic drag, but it would
also reduce the solar panel’s electrical output. Analysis
indicated that the trade could provide a net gain.
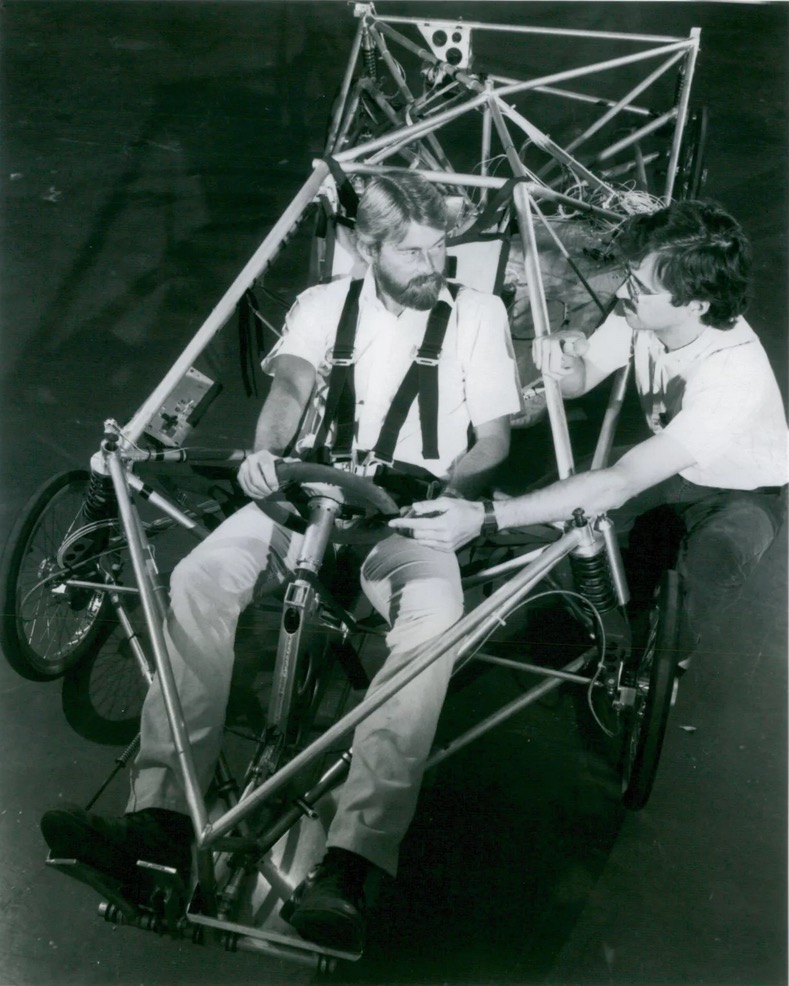
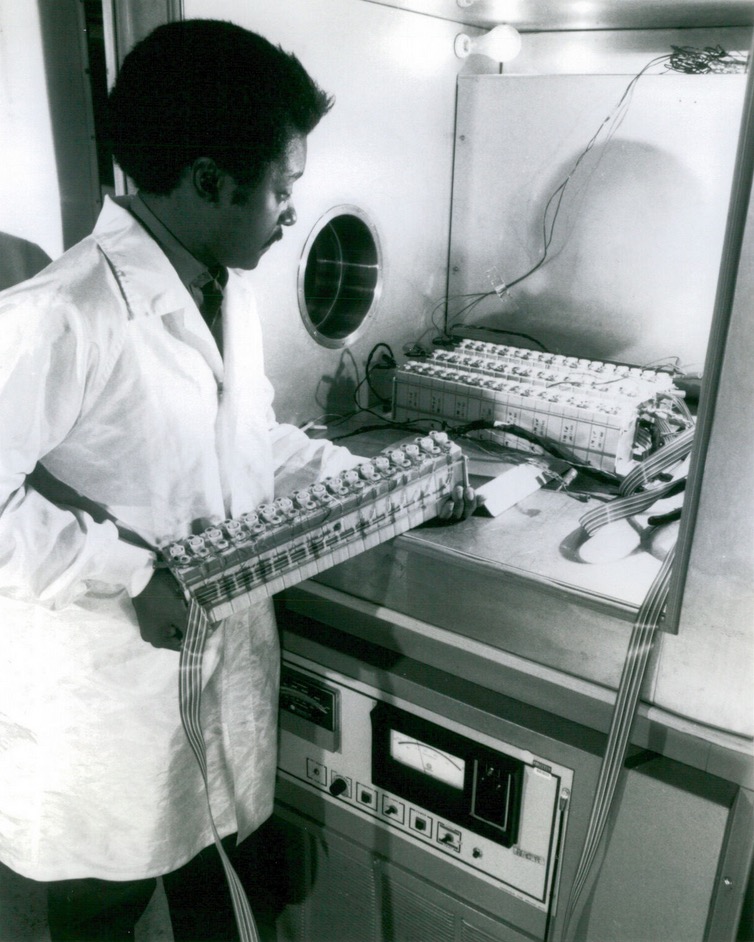
The curved array, however, posed a technical problem:
different parts of the array would have different illumination and
thereby have
different electrical outputs. Based on previous experience
with the design of solar inverters, Cocconi was able to quickly
design and fabricate a so-called “power tracker” – an
electronic regulator which would automatically adjust parameters
such that the maximum possible power would be extracted
from a given solar panel segment. Test results demonstrated the
needed high energy efficiency, accurate power tracking, and low
weight. Twelve panel segments and twelve corresponding power
trackers were used. GM funded the project through
Hughes, and AV went ahead with the design of the SunRaycer.
A quarter-scale model of the SunRaycer was tested in the Caltech
Merrill Wind Tunnel for various parameters, including
cross-wind stability.
In addition to the Power Trackers, Cocconi designed and built the
motor-drive inverter and the associated driving controls.
Hughes provided the space-grade high-efficiency gallium arsenide
photovoltaic cells, which they mounted, interconnected, and tested.
GM designed and fabricated the 5 kg, 7 kW (peak) permanent
magnet electric motor. The key element in the motor was the
high-energy product Magnequench magnet material – recently
developed by GM. Construction and rigorous testing of the
SunRaycer were completed in early October 1987.
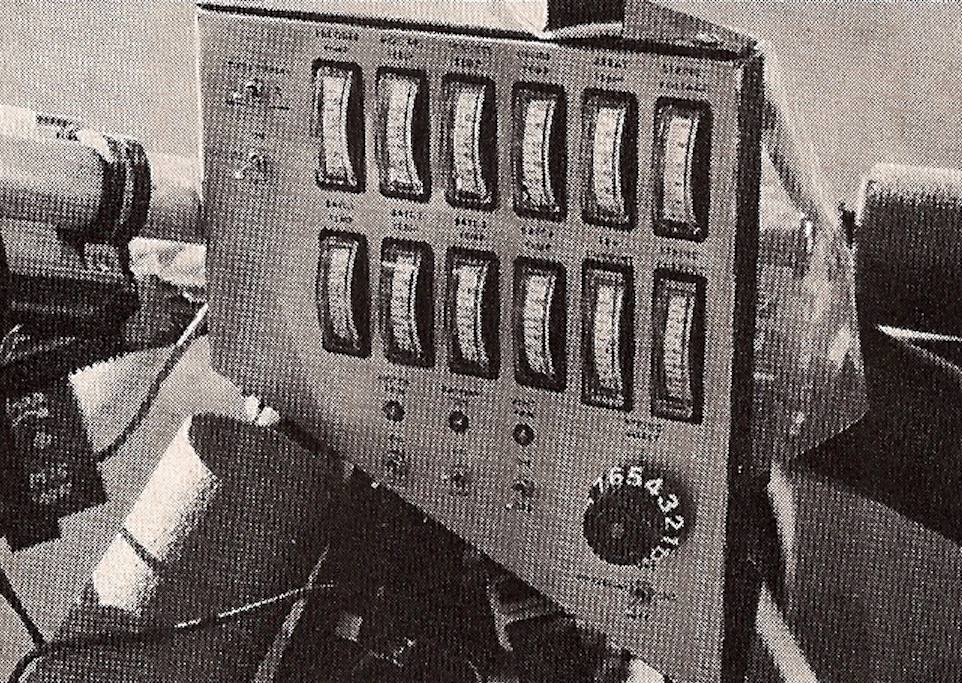
Thanks to a data acquisition and telemetry system developed by
John Gord (Caltech BS ’74), the SunRaycer was able to transmit
system data to a follow vehicle. In real time, parameters such
as battery cell voltages, vehicle speed, and array segment
currents could be viewed and analyzed by race strategists armed
with computer support so that driving speeds could be
optimized for prevailing conditions, and potential problems could
be solved before they became real.
On November 1, 1987, at 9:00 AM, the 1950-mile race
commenced at Darwin in northern Australia. The SunRaycer sprinted
well ahead of the other twenty-four solar vehicles. After less
than six racing days on Australia’s Stuart Highway and a
corrected time of 44 hours and 54 minutes, the SunRaycer crossed
the Adelaide finish line in Southern Australia. Two days later,
the second-place vehicle, Ford’s Sunchaser, crossed
with a corrected race time of 67 hours and 32 minutes. It was a
landslide victory for the SunRaycer.
===
---> Additional pictures below <---
===